Dve metode istraživanja:
- kombinacija različitih elemenata i grasshopper koda za dobijanje forme
- posebno integrirani elementi kao multiple Brep
- elementi prethodno spojeni pomoću Boolean operacije, nakon čega su integirani kao jedinstveni Brep
- svaki element je pojedinačno implementiran u kod, nakon izvršavanja proecesa spojen je u jednu celinu
- kombinacija jednog elementa i grasshopper koda za dobijanje forme
I. metoda: kombinacija različitih elemenata i grasshopper koda za dobijanje forme
Primena Grasshopper algoritma na jednostavnim poliedarskim oblicima omogućila je razumevanje principa transformacije forme i ponašanje atraktor tačaka.
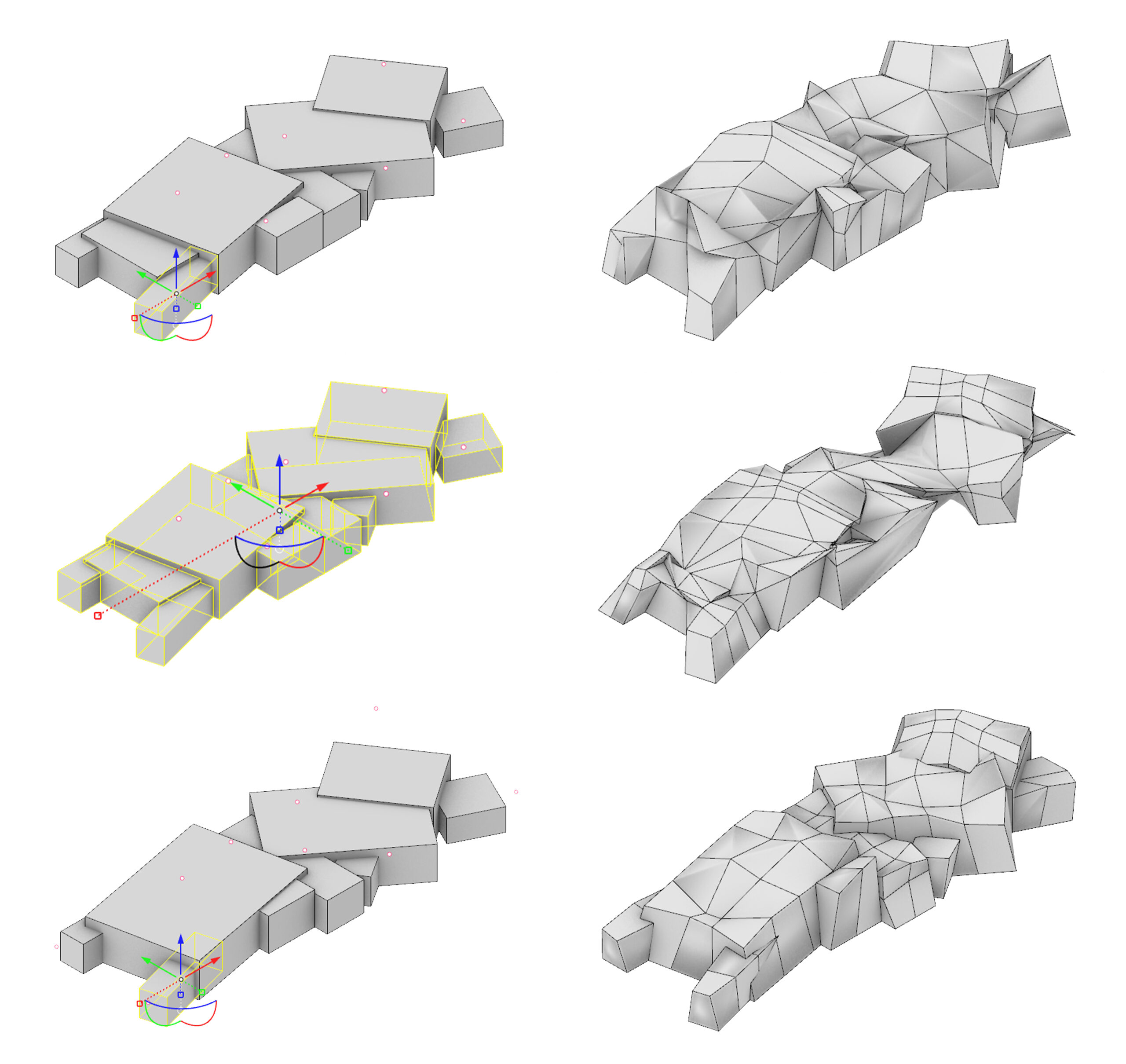
- posebno integrirani elementi kao multiple Brep = uočeno je da elementi ne ostvaruju međusobnu povezanost, čime se gubi kontinuitet površine i dolazi do izražene segmentacije forme; utvrđeno je da je proces pozicioniranja atraktora i njihovog prilagođavanja u svrhu postizanja željenog oblika izuzetno vremenski intenzivan i zahteva visoku preciznost; željena forma nije postignuta
- elementi prethodno spojeni pomoću Boolean operacije, nakon čega su integirani kao jedinstveni Brep = prelaz između elemenata je rešen i kontinuitet je obezbeđen; kod primene skripte uočena je neadekvatnost osnovnog oblika, pojavljuju se problematične zone i neželjene deformacije; utvrđeno je da je proces pozicioniranja atraktora i njihovog prilagođavanja u svrhu postizanja željenog oblika izuzetno vremenski intenzivan i zahteva visoku preciznost; željena forma nije postignuta
- svaki element je pojedinačno implementiran u kod, nakon izvršavanja proecesa spojen je u jednu celinu = uočeno je da elementi ne ostvaruju međusobnu povezanost, čime se gubi kontinuitet površine i dolazi do vidljive segmentacije forme; utvrđeno je da je proces pozicioniranja atraktora i njihovog prilagođavanja u svrhu postizanja željenog oblika izuzetno vremenski intenzivan i zahteva visoku preciznost; oblik je unapređen i približen željenom obliku, čime se otvara mogućnost dalje ručnog modelovanja radi ostvarivanja planiranog rezultata
Iako rezultati iz I.metode ne odgovaraju traženom obliku, primećene su varijacije u modelovanju i različiti ishodi, što ukazuje na širok spektar mogućih rešenja pri primeni Grasshopper skripte.
II. metoda: kombinacija jednog elementa i grasshopper koda za dobijanje forme
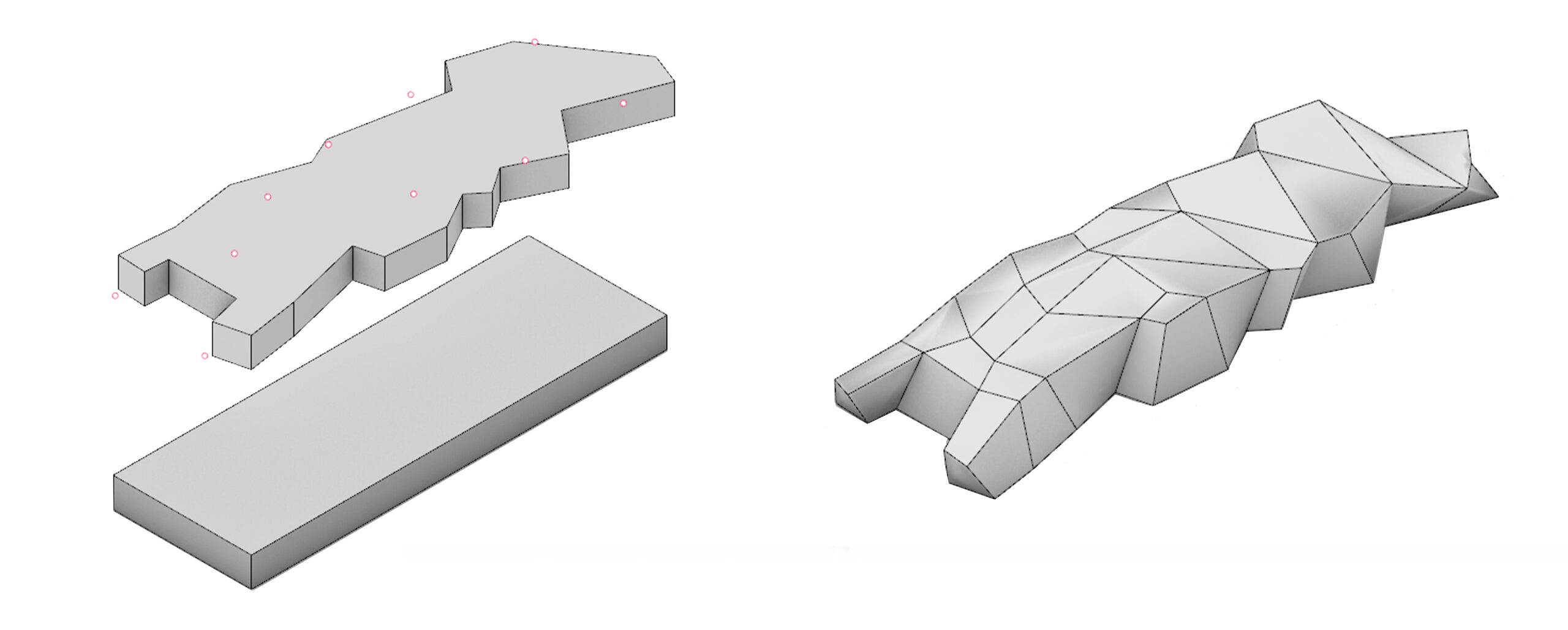
Osnovni oblik uz izdizanje na jednu visinu pokazuje se kao najpogodniji za dalji proces modelovanja. Korišćenjem Grasshopper algoritma i veće količine atraktor tačaka, proces postizanja željene forme je ubrzan i precizniji sa minimalnom naknadnom obradom dobija se konačni objekat Hindustan Lever Pavilion.
Zaključak: II. metod se pokazuje kao najoptimalnije rešenje za ovaj slučaj, omogućavajući bolje performanse i fleksibilnost kod različitih zadataka, dok I. metod zahteva veću preciznost i vreme sa dosta dodatne obrade, isto pruža širi spektar mogućih rešenja.